SonNav: Innovative Simultaneous Localization and Mapping Techniques for Unmanned Underwater Vehicles
Experience next-generation Unmanned Underwater Vehicle (UUV) navigation with Oceanic Imaging Consultants (OIC) SonNav system. Our pioneering algorithms provide unmatched navigation fix accuracy using real-time Simultaneous Location and Mapping (SLAM) on side scan sonar (SSS), synthetic aperture sonar (SAS), and multi-beam echo sounder (MBES) data. OIC’s SonNav offers reliable, seafloor-based navigation sans surface presence, where traditional SLAM methods falter. SonNav development has demonstrated operation from sonar data to navigation fixes and will interface with existing or Unmanned Maritime Autonomy Architecture (UMAA) navigation systems. OIC’s sonar processing products, compatible with 70+ sonar models, have been trusted by commercial and government customers for 30 years. OIC’s products deliver real-time sonar data capture, comprehensive post-processing, re-navigation, and sea floor analysis.
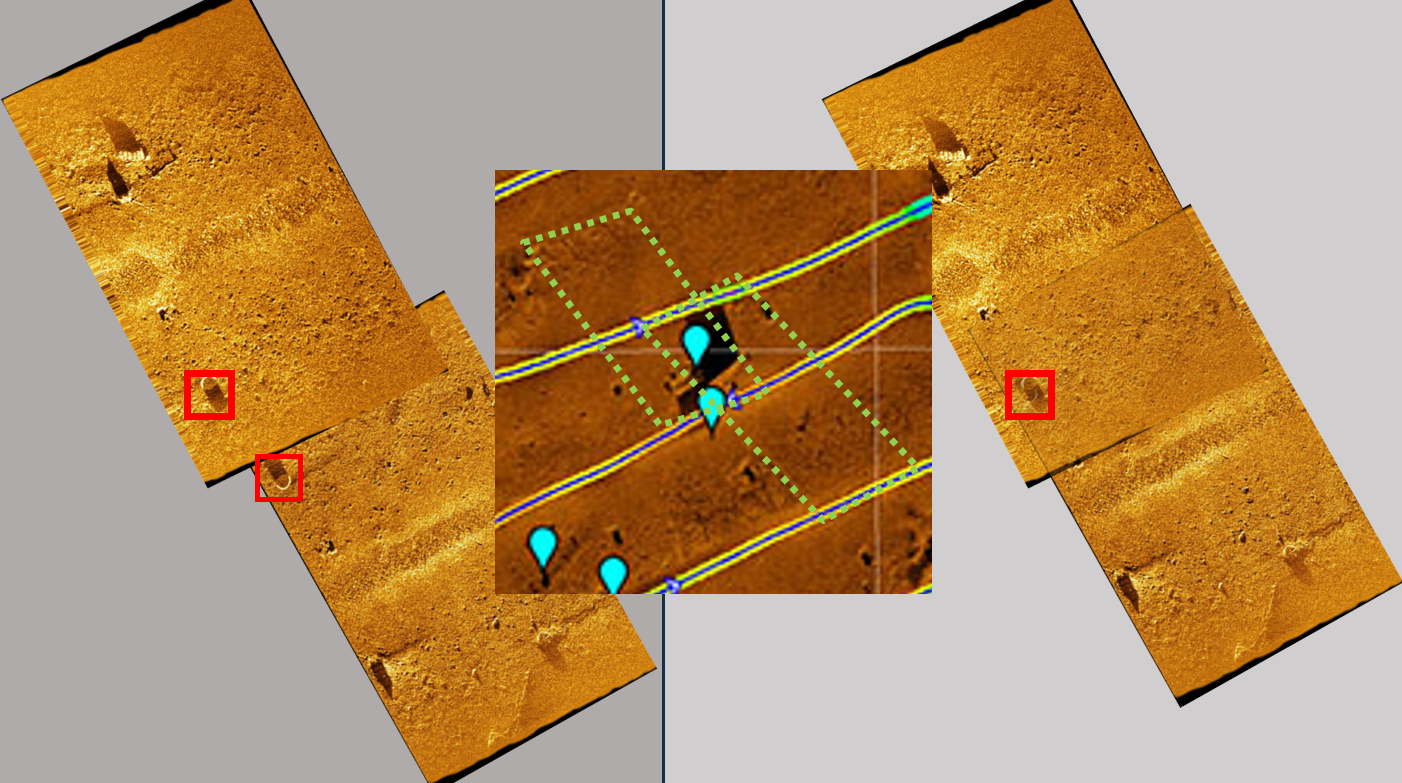
Navigation correction from Sidescan imagery using automatic target recognition. Uncorrected navigation on the left and corrected navigation on the right.

Complete survey of Keehi Boat Harbor. Uncorrected navigation track in blue and corrected navigation track in green.
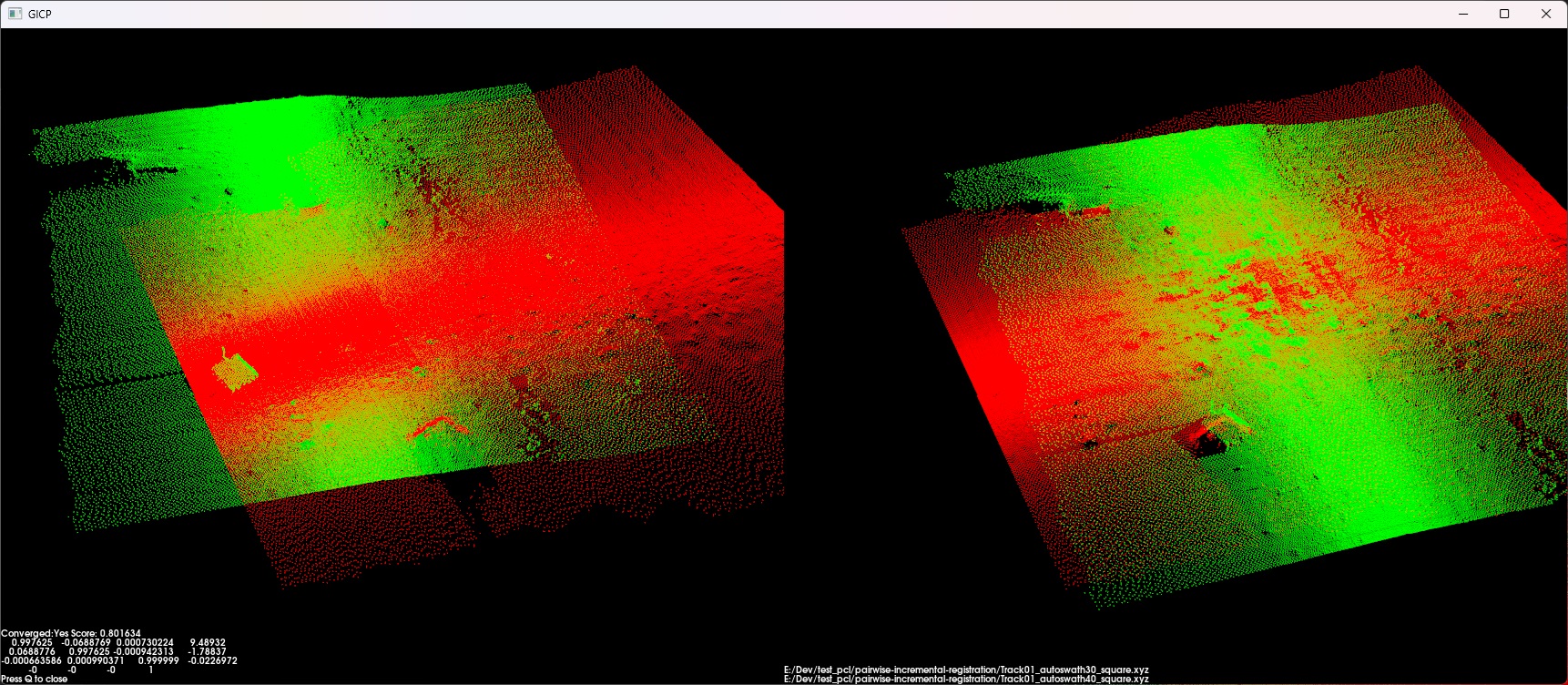
Keehi Boat Harbor MBES point cloud data is shown for two survey tracks shown in greeen and red, with the uncorrected navigation on the left and the corrected on the right.
Navigation correction from MBES point cloud data works very well. The red and green point clouds are from different survey tracks with the left is uncorrected and the right corrected.
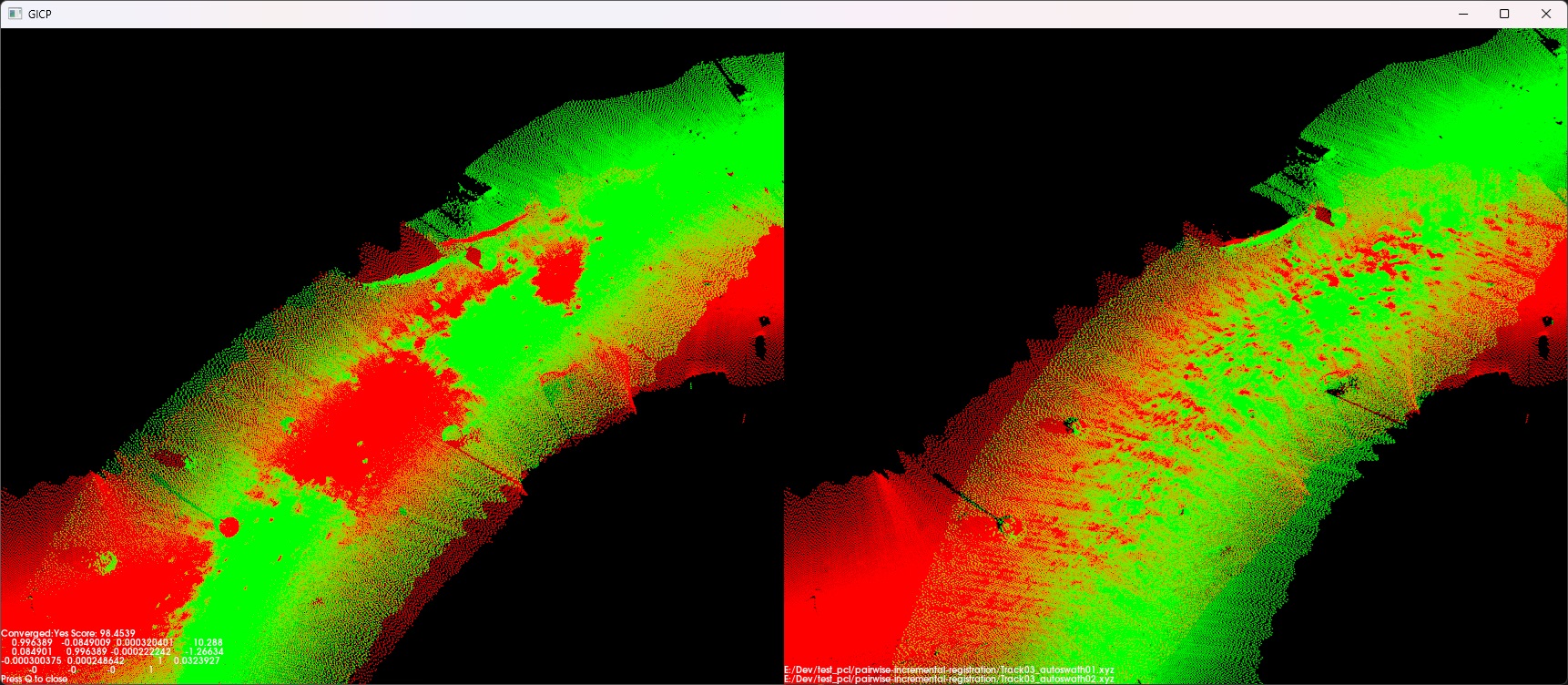
Another example of corrected MBES data featuring sunken barges.
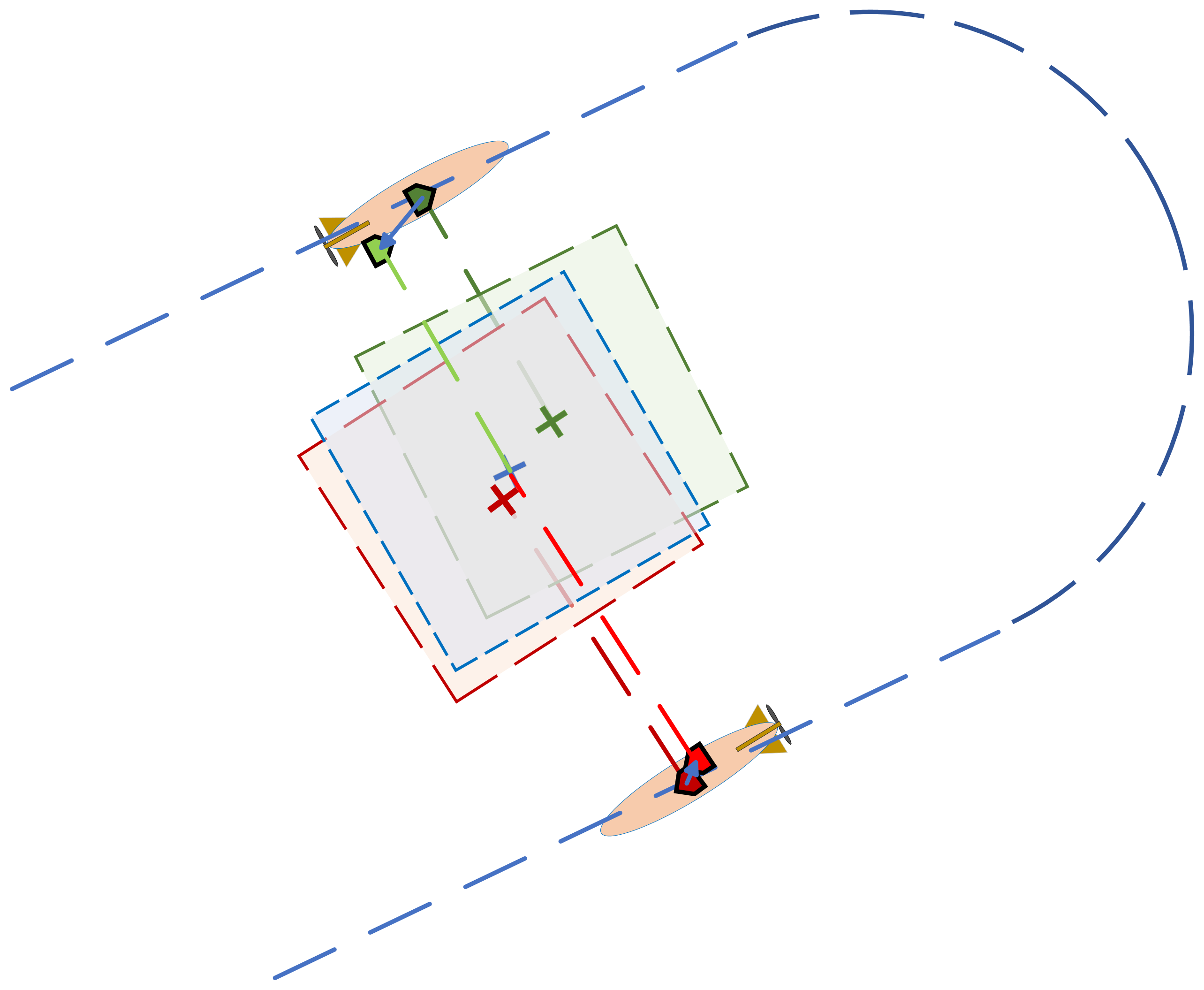
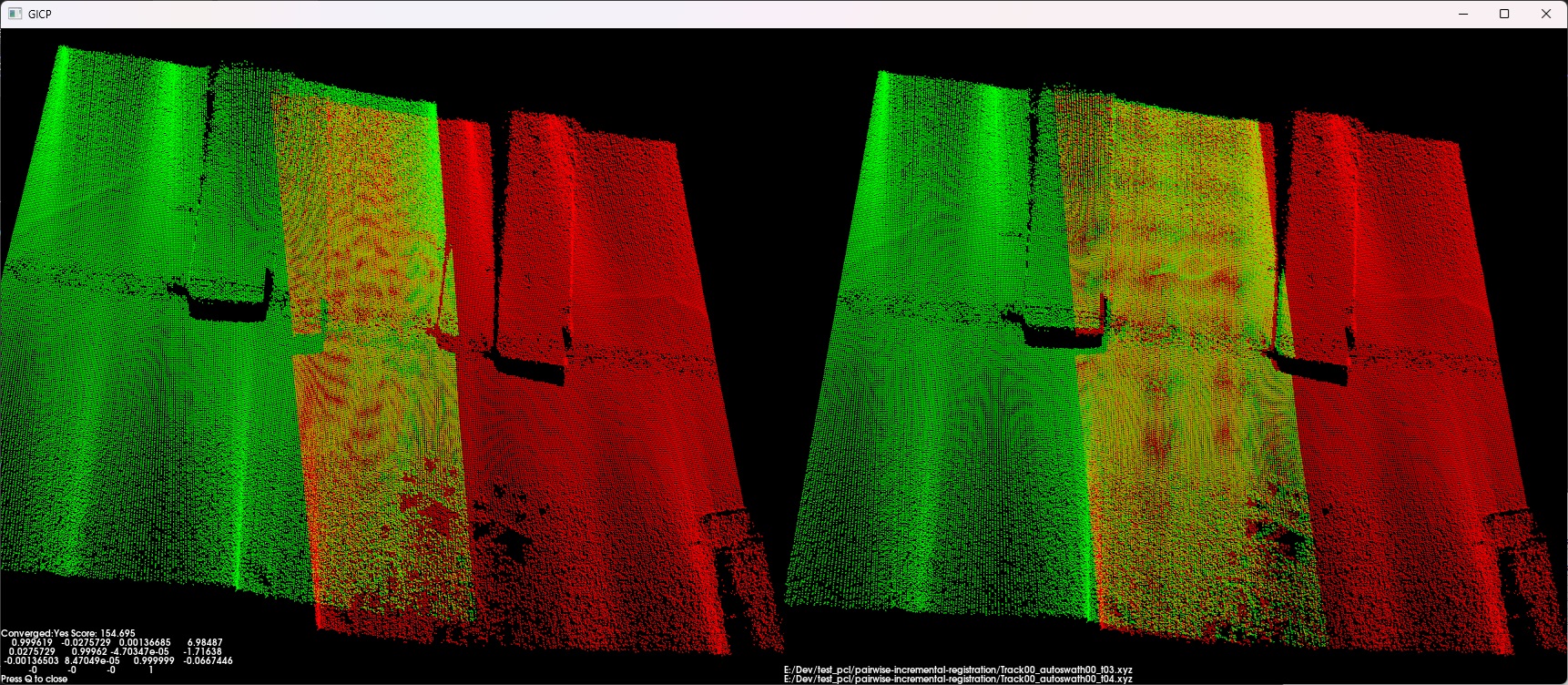
Sidescan and MBES point cloud tiles from two track lines overlap. The output of the co-registration of the overlapped point clouds is used as a factor for the SLAM solution at the 2nd UUV position.


